正弦波を発振させる色々な電子回路|ウィーンブリッジ・クワドラチャ・ブリッジドT・コルピッツ
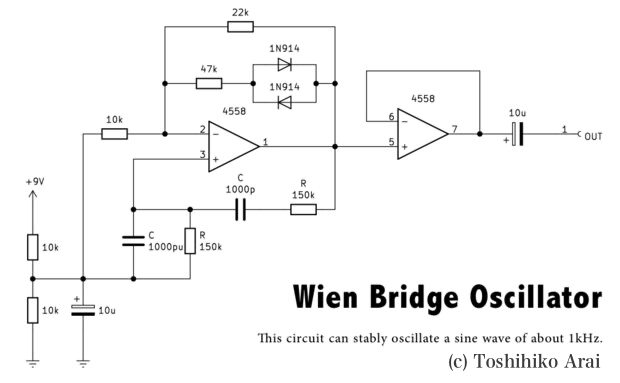
ウィーンブリッジ正弦波発振器 回路図 こちらがその回路図である。「OPアンプ回路の設計」を参考にさせてもらった。 発振周波数の計算 RとCの値によって発振周波数が次式で決定する。 $$f=\frac{1}{2πCR}$$ よって、この回路定数では約1kHz(1061Hz)で発振するようになっている。 解説 普通のウィーンブリッジ回路では、電源オン時に発振しないことがある。しかし、このダイオードを付け足した回路では確実に発振するようだ。もともとはフィラメント電球を使って発振を安定させていたようだ。しかし、フィラメント電球の消費電力は大きく、オペアンプにはミスマッチということで発振を安定させるための工夫が色々考え出された様子。ダイオード以外にもFETを使ったフィードバック制御で発振を安定させる回路も見つかった。 さて、ウィーンブリッジ回路は反転増幅回路の形である。その増幅率を2倍に設定しなければならないようだ。つまり、反転入力の10kΩと22kΩの比が大事である。これらの抵抗の値は、単純に手に入りやすい抵抗を選んだわけではなく、色々と実験した結果この値に決定した。 正弦波がキレイになるように、そして確実に発振するように最適値を選んだのがこれらの値である。数100Ω違うだけで波形や発振に影響が出るので、作るときは各自一度はブレッドボードで実験して調整して欲しい。もしかしたら、4558以外のオペアンプではキレイに発振しない可能性もありうる。 今回もモジュール化してブレッドボードで使いやすいようにしてみた。音響回路の実験ではとても重宝しそう。1kHzの他に、20Hzや20kHzの発振モジュールも作る予定。 出力波形 オシロスコープで出力を観察すると、このようにキレイな正弦波が確認できる。 クワドラチャ正弦波発振器 ウィーンブリッジ発振器では、出力信号がだんだん小さくなり発振が止まってしまいました。ウィーンブリッジ発振器で安定して発振させるには難しいようです。そこでもっと安定して発振するといわれる「クワドラチャ発振器」を作ってみることにしました。 クワドラチャ発振器は、デュアルオペアンプ1つで作ることができます。部品数は ウィーンブリッジ発振器 と大差ありませんので、これから作るのであればクワドラチャ発振器をおすすめします。 なお、この記事で紹介する回路は 「OPアンプ回路の設計」を参考に、私が単一電源で動くように改造 したものになります。 回路図 9V電池の単一電源で動かせるようになってます。 オペアンプのV+(8番)は9V電源に、V-(4番)はGND(仮装ではないGND)につないでください。 単一電源9V電池で動かす設計ですので、GNDと表現しているのは電池のマイナス極の意味になります。 オペアンプはNJM4558になってますが、TL072などでも構いません。 発振周波数の計算 ウィーンブリッジと同様に、 CとRを同じ値にそろえれば、発振周波数を簡単に設定できます。 発振周波数の計算は次のとおりです。 $$f=\frac{1}{2πCR}$$ 解説 この回路では、約1kHz(1061Hz)で発振するように設定しました。出力にボリューム抵抗を使って、出力の大きさを調整できるようにしてあります。 オペアンプの3番ピンから7番ピンにまたがっている160kΩ(10kΩ+150kΩ)の抵抗は、Rの値の10%くらいに調整するとキレイに発振するようです。 オペアンプの7番ピンからは、位相が90度ズレた余弦波(cos波)も得られます。興味のある方はやってみましょう。 回路の組み立て ブレッドボードで扱いやすいようにするため、基板を作ってクワドラチャ発振器モジュールを作ってみました。 出力波形 クワドラチャ発振器を動かして、出力波形を観察してみました。このようにキレイなサイン波が得られました。 わずかですが下側がクリップしてましたので、3番ピンから7番ピンの抵抗を160kΩから157kΩに変更しました。ここらへんは各自で微調整してみてください。 出力の可変抵抗を調整して、1Vppにすると低周波回路実験で使いやすいです。 ブリッジドT型正弦波発振器 回路図 ブリッジドT型のノッチフィルタを利用した正弦波発振回路である。今まで作ってきたウィーンブリッジやクワドラチャ発振器よりも簡単に作れる回路である。 回路図の、R2を10kΩあたりの半固定抵抗にしてキレイな正弦波になるところで固定する(それ以外の値だと、歪んだ正弦波になってしまう)。この場合だと丁度2kΩでキレイな正弦波が観察された。オシロスコープのメモリから周波数は大体500Hzと読み取れる。 発振周波数の計算 理論上の発振周波数は、ノッチフィルタと同様に次式で計算可能である。 $$f=\frac{1}{2π\sqrt{\frac{R_1}{R_2}}CR_2}$$ 回路図の定数を上の式に当てはめて計算すると、発振周波数は520Hzとなりオシロスコープで観察した周波数と大体一致する。 出力波形 出力インピーダンスはそれほど高くなく、10kΩ以上の負荷で使用すること。心配ならば後段にバッファー回路を設けた方が良い。 他にも似たような発振回路としてツインT型発振回路がある。同じようにキレイな正弦波が得られるが、ブリッジドT型よりも部品数が若干多くなるため、どうせ作るならこちらの方が良いだろう。 ブリッジドT型ノッチフィルタは他にもバンドパスフィルタにもなって何かと便利な回路である。 コルピッツ正弦波発振器 コイルとコンデンサを使ったコルピッツ発振器を紹介する。 オペアンプを使った回路図 エフェクターなどの低周波回路でコイルを使うとすると、コイルの大きさがデカくなってしまいなかなか出番がないが、高周波回路ではコイルが大活躍できる。今回は可聴音域以上の100kHzあたりで発振するオシレータを作ってみた。こちらが今回オペアンプで作ったコルピッツ発振回路である。 解説 9Vの単一電源で動作させる想定。バイアス電位は、電源を抵抗分割で作った4.5Vに繋ぐ。 回路図から分かる通り、反転増幅回路となっている。R2をR1より大きくすることで、増幅率が1以上となり発振する。増幅率をわざと大きくすれば矩形波を作ることも可能。 キレイな正弦波になるように、R3を調節して100Ωと決めた。R3を0Ωにすると、消費電流が2mAも上がり、オペアンプに負荷がかかっている様子。逆に大きくしすぎると発振しない。ここら辺はLCの値や使うオペアンプによっても変わってくるため、実験しながら決めた方が良いだろう。10Ω単位で波形の歪みが大きく変わるので要注意だ。 また、確実に発振させるためには、C2はC1より大きくした方が良いようだ。LとCの大きさの組み合わせによっては発振しなかったりするのでとにかく試行錯誤するしかない。 今回は、何かの部品取りで残っていた68μHのコイルを基準にし、100kHz〜200kHz以内の発振に収めたかったためこのような定数となった。 ...