ESP32 で Sigfox をはじめる
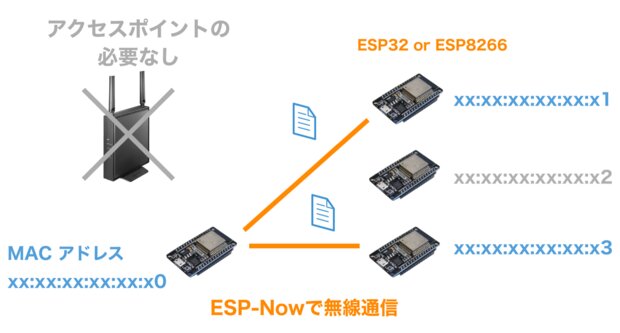
はじめに この記事では、ESP32 と Sigfox ブレイクアウトボード BRKLSM100A を使って、WiFiの届かない数キロメートル先の基地局へセンサーデータを送信する方法を解説します。Sigfox は年間1000円程度・アクセスポイント不要で使える LPWAN サービスで、ESP-NOW や BLE が届かない広域 IoT 通信に適しています。ATコマンドの設定手順から Sigfox クラウドの Callback 設定(Slack 通知)まで、実際に躓いた点も含めて紹介します。 Sigfox の具体的な設定方法や技術的な質問にはお答えできませんのでご了承ください。 Sigfoxとは Sigfox は、低消費電力の広域ネットワーク(LPWAN: Low Power Wide Area Network)技術の一つで、主に IoT デバイス向けに設計されています。LPWANは0G回線とも呼ばれています。Sigfox サービスを展開するのはフランスの会社ですが、日本では 京セラさんが代理店 として窓口に立ってくれています。なにか分からないことがあれば、京セラさんが丁寧にご回答してくれます。 https://www.kccs.co.jp/contact/sigfox/inquiry/ 以下、Sigfox の特徴をまとめておきます。 低消費電力 デバイスのバッテリー寿命が数年に渡ることが可能です。通信頻度が低く、消費電力が非常に少ない設計になっています。Sigfox デバイスを制御するには、UART の AT コマンドを使います。Arduino や ESP32、または PIC などでも制御できます。低消費電力の PIC であれば、Sigfox デバイスと組み合わせて太陽電池やリチウム電池で長期間運用も実現可能です。 広範囲カバー Sigfox デバイスから Sigfox 基地局(Sigfox ゲートウェイ)まで、数キロメートルから数十キロメートルにわたる広範囲の通信が可能です。都市部では数キロメートル、農村部では数十キロメートルの通信距離をカバーします。Sigfox GW(ゲートウェイ)は自前で用意する必要はありません。下記 URL に Sigfox 通信できるエリアが示されています。日本の首都圏で広く展開されており、山間部などの一部地方ではつながらない場合があります。 https://www.kccs.co.jp/sigfox/area/ 世界中の多くの国で利用可能で、国境を越えた通信が容易に行えます。Sigfox のネットワークオペレーターがインフラを提供します。 低データレート 1回の通信で最大12バイトのペイロードを送信できます。16進数2文字で1バイトなので、最大24桁の16進文字列(例: 0123456789ABCDEF01234567)まで送れます。センサ値をバイナリに詰めて16進文字列として送れば、12バイト内に複数の値を収められます。一日の送信回数に制限があり、通常は140回までです。 ...